…with how I make things go for companies just like yours…
I’m the connective tissue between all the components of your robot, the people and other systems it interacts with. I know what’s connected to what, how they all move and tug at each other. Think of me as a composite character of Winston Wolf from “Pulp Fiction” and the Guild Navigator from “Dune”. A skilled problem-solver for in-the-moment crises while also an indispensable guide, planner & strategist that keeps you from getting lost in the hostile, chaotic void between where you are now and success.
Since 2014, companies such as as Google,Relay Robotics(Formerly Savioke), SpaceNG, Polymath Robotics, Open Navigation, RIOS , Parker/LORD-Microstrain , FLX Solutions, Circuit Launch and others have engaged with me for a variety of projects ranging from early-stage hardware prototyping with C code and microcontrollers, troubleshooting USB network and power problems, to ROS development, simulation with Gazebo and MoveIt!, to scaling their build and systems infrastructure as they ramped their manufacturing capabilities. I regularly provide Investment and Analyst Firms with guidance on market trends and emerging verticals in robotics, automation, AI, Cybersecurity and more.
Head over to my Calendly to book a quick(or longer!) meeting and let’s chat about how I can make things go for you to!
Stephen “Stef” Okay Consulting Roboticist, Familiar Robotics.
Client:Space-NG Project: Porting Space-NGVision Navigation Software to custom machine-vision hardware for use on next-gen lunar lander vehicle. Tools/Tech: OpenCV, OpenGL, GCC, Yocto Linux, Android, NVIDIA CUDA, Leopard Imaging vision sensors & firmware
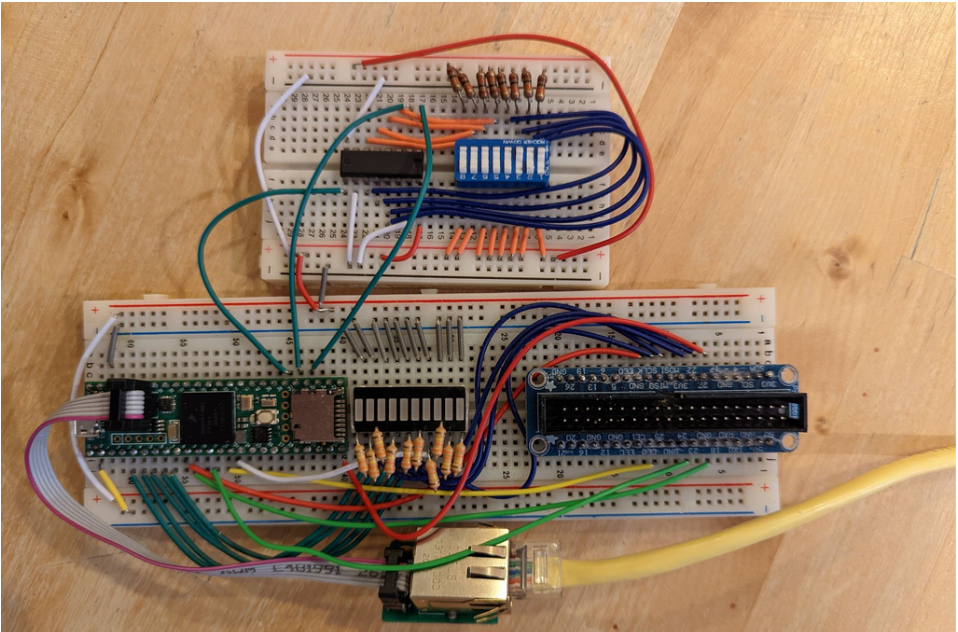
Client:Polymath Robotics Project: Prototyping and On-site Integration, Platform bring-up & Debugging for autonomous Agricultural and Industrial Vehicles Tools/Tech: LTE/5G, radio & antennas, IP Networking, CAN, GPS/GNSS, LIDAR,RADAR, NVIDIA Jetson, ROS2, CAD, Rapid Prototyping
Client: Frontier Towers, San Francisco, CA. Project: Training and team-building Tools & Tech: course-development, mentorship, 3D-printing, basic robotics and electronics assembly & debugging.
In advance of the 2025 Le Robot Hackathon SF, Frontier Towers approached me for a day-long training session for their members. I led a one-day robot-building bootcamp, teaching about 30 engineers with backgrounds in AI & FinTech, but little to no hardware experience, how to build a robot arm, using the Le Robot SO-ARM100 kit as an example.
A group of engaged, happy robot-builders at Frontier Towers in SF. We did it! Over 30 SO-10x arms ready for the LeRobot Hackathon
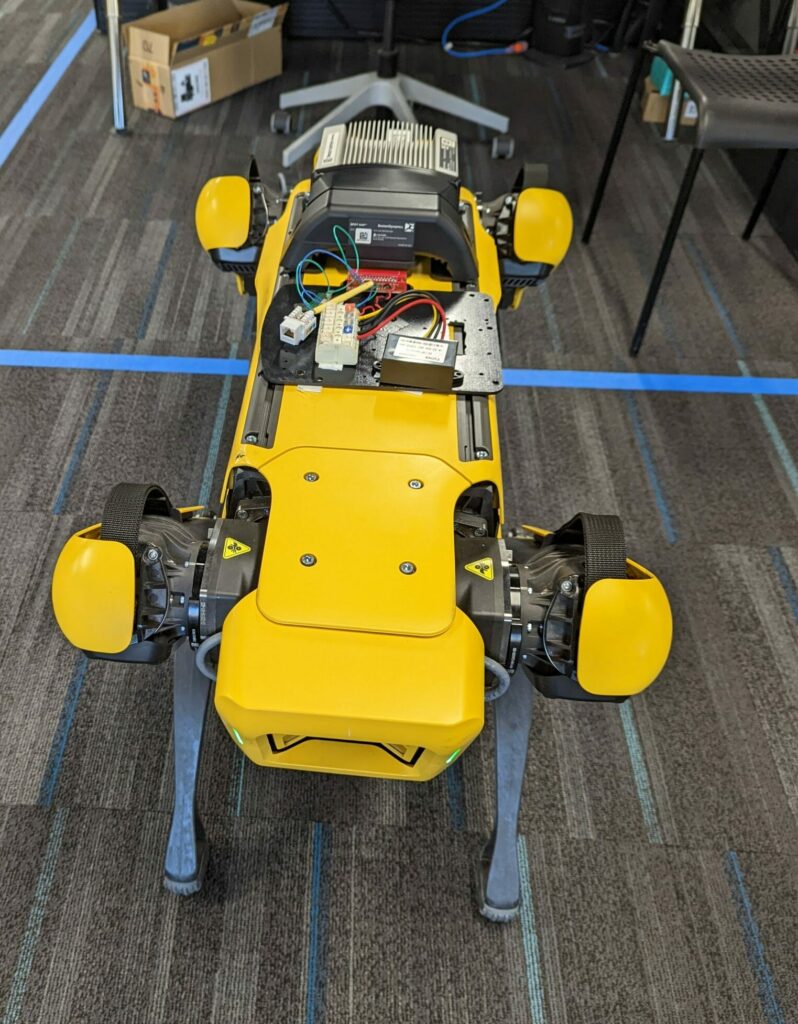
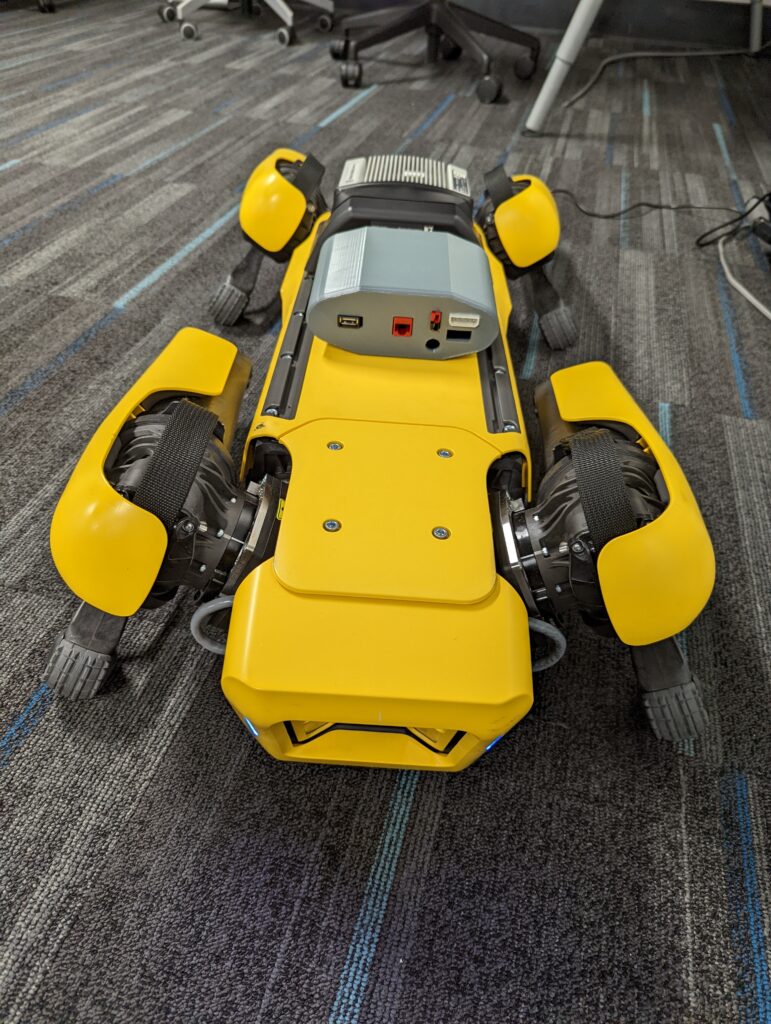
Power/Network Adapter box/board developed in-house for Boston Dynamics “SPOT” Robot, feat. 5/12/24V power & POE/Gigabit Ethernet.
Spot with the Familiar SpotBox PoE/Power AdapterBoston Dynamics Spot with a prototype PoE Power/Data board designed by Familiar Robotics
Roboticist in Residence work at Circuit Launch
Doosan Palletizer bring-up
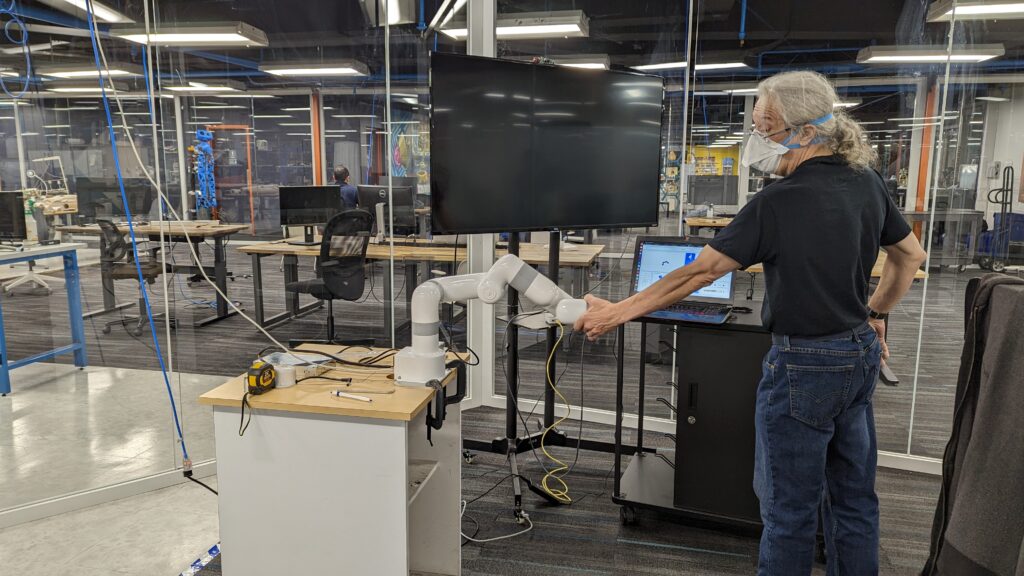
xArm Lite6 grasping training w/ ROS
Sawyer rehab
Hanging out with a new *BIG* friend, a Doosan palletizer robot.Reviving SawyerTeaching xArm Lite
The Tenacity Rover
The Tenacity Rover is the workhorse of the lab space here at Familiar. Similar to the rovers at the JPL “Mars Yard”, it gets stuff bolted to it, removed and replaced again, all in the name of testing out new software, sensors and techniques for the projects I’m working on. It has its own Hackaday page and YouTube channel.
The “Tenacity” 3D-printed rover hanging out in the CircuitLaunch parking lot.